SKSMT-30型 氣動機械手控制模型
所屬類別:機電一體化系列
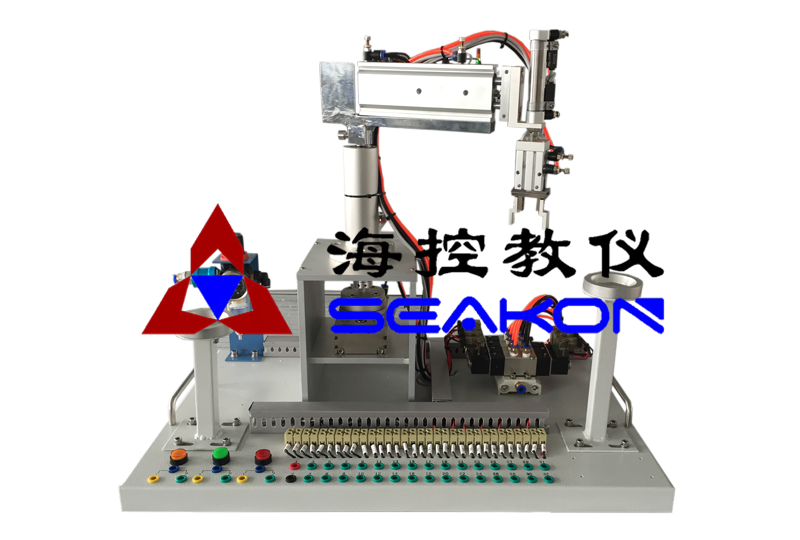
·設備外觀
·設計簡述
實訓模型是一套完整的氣動機械手搬運裝置,由安裝底板、氣動手指、單桿提升氣缸、雙導桿伸縮氣缸、旋轉擺動氣缸、多種類型磁性傳感器、多種類型電磁閥、空氣過濾器、氣源控制滑閥及接線端子排及各種電氣控制元件等組成。主要完成物料的搬運功能,氣動機械手通過前臂下降,氣動手指夾緊物體,手臂縮回,手臂右擺,手臂前伸,前臂下降,手爪松開將物體放到指定位置等動作后,機械手返回原位。將電磁閥及磁性開關等元件的引出線連接到相應的端子接線排上,方便使用。能滿足職業院校可編程控制器、機電一體化、氣動技術等相關課程的實訓教學。·主要參數
1.工作電源:DC24V±5% 1A;2.工作環境:溫度-10℃- +40℃ ,相對濕度<85%,海拔<4000米;
3.氣源壓力:0.4MPa;
4.裝置容量:<0.5kVA;
5.外形尺寸:600mm×400mm×500mm。
·組成及功能
1.可與多種實訓系統集成使用。2.設備組成:實訓裝置主要由型機械手模型、氣動執行組件、氣動驅動組件、電器控制單元、、控制按鈕與指示模塊、氣缸、空氣壓縮機、傳感器等組成。
3.主要功能:開機復位、橫軸前升、手旋轉到位、電磁閥動作手爪臺開、豎軸下降、電磁閥復位手爪夾緊、豎軸上升、橫軸縮回、底盤旋轉到位、橫軸前伸、手爪旋轉、豎軸下降、電磁閥動作手爪臺開、豎軸上升、復位。
·實訓項目
1.模型自動運行(包括實訓臺基本操作、組成等)2.模型設計原理與模塊認知 (主要對設計思路方向的訓練)
3.氣動回路識圖
4.電氣原理圖識圖
5.模型氣動元件裝配
6.氣動方向控制回路的安裝
7.氣動速度控制回路的安裝
8.氣動順序控制回路的安裝
9.氣動系統氣路的連接
10.磁性開關的位置調整
11.氣動系統調試
12.機械手物料搬運綜合控制
